10.14.37")
 10.14.27")
 21.32.52")


 10.55.08")
 11.00.26")









")





 17.24.08")








 17.32.30")
















 17.05.44")

 17.05.56")

Helen Darias Hernández, proveniente de la República de Cuba y estudiante de la Maestría en Ciencias en Ingeniería Mecatrónica del TecNM campus Tuxtla Gutiérrez, presentó su informe final de resultados de su investigación sobre “Control Colaborativo” el cual busca diseñar un controlador para un sistema multiagente de vehículos móviles de tipo diferencial empleando técnicas convexas.
De acuerdo a la Estudiante, los sistemas multiagentes se usan para cuando un robot individual le fuese casi imposible de realizar tareas como busqueda y rescate, exploración y seguimiento entre otras, los sistemas multiagentes en formación líder- seguidor tienen la finalidad de seguir una trayectoria para un fin común.
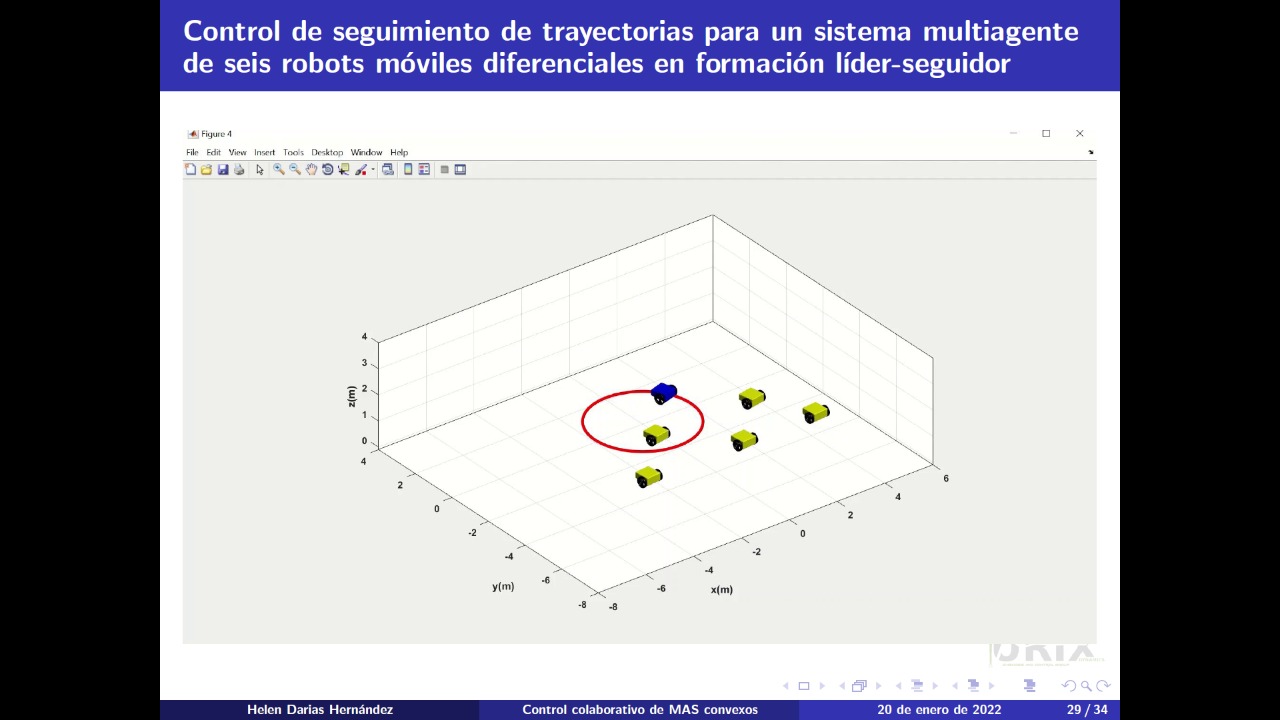
“Este proyecto lo estuvimos trabajando en conjunto con el asesor Dr. Francisco Ronay López Estrada y la Universidad Politécnica de Cataluña, España, consistió en hacer un modelado sobre un robot diferencial, a partir de ese modelo se tuvo el error de seguimiento de trayectoria, dado que se buscaba que estos robots siguiesen una trayectoria y mediante las técnicas convexas se logró diseñar un controlador que permitiera que hiciera el seguimiento, de esta manera y aplicando protocolos de control distribuido a cada agente seguidor se logró que un sistema multiagente de 6 robots pudieran seguir una misma trayectoria“.
El objetivo general es el diseño de controladores convexos que mejoren el desempeño de este tipo de sistemas no lineales, y en trabajos futuros poder implementarlos de forma física en sistemas diferenciales reales.
Este informe se presenta como resultados de la tesis, para con ello valorar si cumple con lo requisitos para después pasar a la titulación, en esta ocasión, docentes e investigadores, felicitaron a la Ingeniera Helen Darias por los resultados obtenidos.
“Ciencia y Tecnología con Sentido Humano”
Departamento de Comunicación y Difusión
TecNM campus Tuxtla Gutiérrez